Pont roulant anti-ballant et pendule inversé sur chariot motorisé
 Garanties sécurité
Garanties sécurité
(à modifier dans le module "Réassurance")
 Politique de livraison
Politique de livraison
(à modifier dans le module "Réassurance")
 Politique retours
Politique retours
(à modifier dans le module "Réassurance")
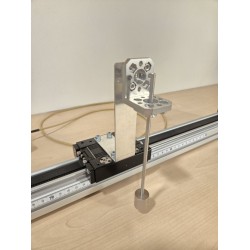
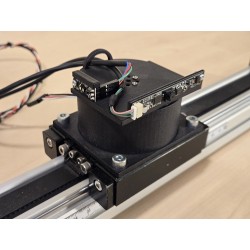
Ce système est basé sur un rail portant un chariot motorisé par un moteur à courant continu. Ce chariot porte une tige libre en rotation, celle-ci étant mesurée par un codeur absolu. Les activités liées à cette partie opérative sont les suivantes:
Il est également possible de réaliser les activités suivantes:
Ce système existe également en version "Slider Cam":
https://boutique.3sigma.fr/robots/203-slider-cam.html.
Vous pouvez compléter votre système en "Pont Roulant / Pendule Inversé" en rajoutant uniquement la partie opérative "Slider Cam":
https://boutique.3sigma.fr/robots/205-partie-operative-slider-cam.html
Une présentation générale de ces deux systèmes est disponible sur la page suivante:
https://www.3sigma.fr/Systemes_didactiques-Slider_Cam___Pont_Roulant_version_2.html
Pont roulant anti-ballant et pendule inversé sur chariot motorisé