Ce "shield" se connecte sur une carte pcDuino, Arduino ou compatible, quelque soit son type, pour lui permettre de commander un moteur à courant continu. Il a été conçu pour apporter de nombreux avantages par rapport aux autres shields de commande moteur existant sur le marché:
utilisation d'un driver de moteur performant (DRV8871 de Texas Instruments)
mesure de courant dans le moteur
mesure de la tension d'alimentation des deux bornes du moteur
choix des broches PWM utilisées, 2 parmi 4
6 connecteurs banane 2mm pour visualiser les signaux rapides sur un oscilloscope
les broches "codeur" sont routées vers les voies 2, 3 et 13 permettant la mesure de vitesse via le comptage d'interruptions ou en utilisant la fonction QDEC de l'Arduino Due
compatible pcDuino
Les caractéristiques complètes sont les suivantes:
compatible avec les cartes Arduino 5V ou 3.3V
compatible pcDuino. Il est même possible d'alimenter la carte pcDuino via le shield en soudant un convertisseur de tension (comme le Traco Power TSR-1 2450) sur l'emplacement réservé à cet effet
basé sur le driver DRV8871 de Texas Instruments (fiche technique)
tension d'alimentation commune ou non avec celle de l'Arduino (configuration par jumper) comprise entre 6.5V et 45V
alimentation par jack 5.5 / 2.1mm ou par bornier à vis
courant maximal en pic: 2.5 A
possibilité de limiter le courant de façon matérielle à une valeur inférieure en soudant une résistance traversante ou une résistance CMS en boitier 0805
mesure de courant dans le moteur via une résistance de shunt de 0.01 Ohm associée à un INA213 de Texas Instruments (fiche technique)
mesure de la tension d'alimentation des deux bornes du moteur (optionnel, configuration par jumper)
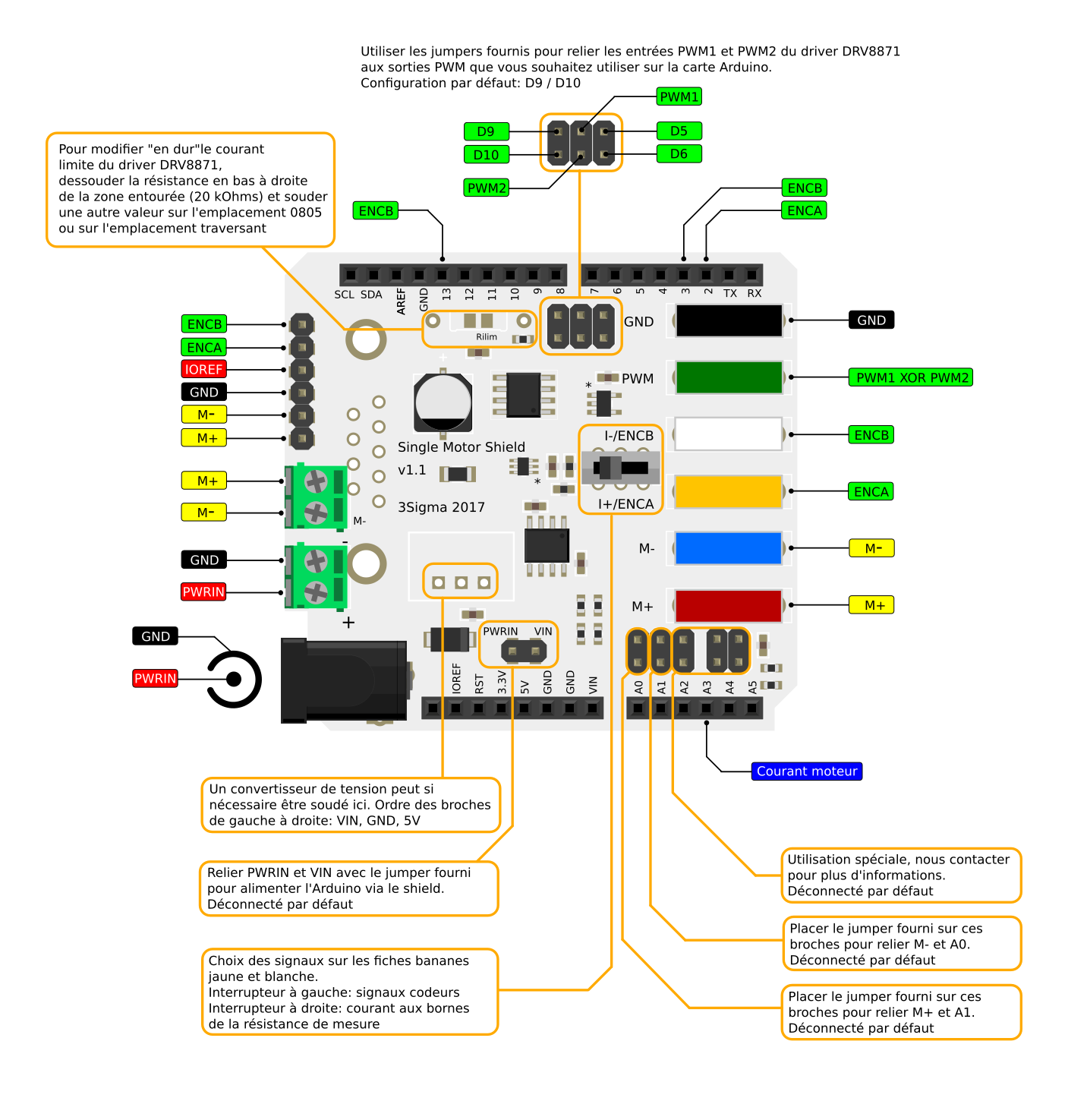
sélection des broches PWM utilisées (configuration par jumper), 2 parmi les 4 suivantes: 5, 6, 9, 10
variation de vitesse et changement de direction grâce au pilotage des deux broches PWM choisies
fréquence PWM max: 200 kHz
branchement direct d'un moteur Pololu 25D avec codeur incrémental (comme celui-ci ou celui-là). Les voies A et B du codeur sont routées sur les broches 2,3 et 13 du shield
le routage des voies du codeur incrémental sur les broches 2 et 13 permet l'utilisation de la fonction QDEC (mesure de vitesse native par le mirco-contrôleur) sur Arduino Due
branchement possible des deux bornes du moteur sur un bornier à vis
possibilité de visualiser 5 signaux rapides sur oscilloscope grâce à 6 connecteurs banane 2mm:
rouge: moteur +
bleu: moteur -
jaune: codeur A
blanc: codeur B
vert: PWM
noir: GND
Synoptique de la carte:
La documentation du shield est téléchargeable ici.





 Garanties sécurité
Garanties sécurité
 Politique de livraison
Politique de livraison
 Politique retours
Politique retours